
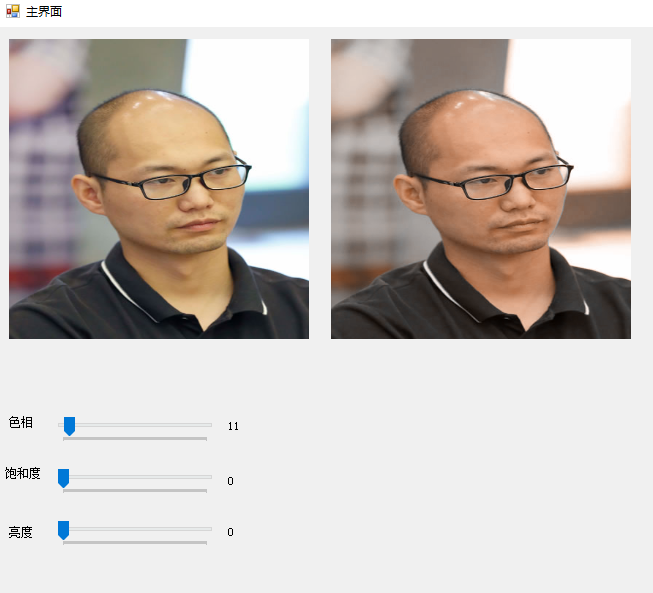
通过trackBar调整值大小(最大值设置为255)。
using OpenCvSharp;
using OpenCvSharp.Extensions;
using DlibDotNet;
using System;
using System.Collections.Generic;
using System.ComponentModel;
using System.Data;
using System.Drawing;
using System.Linq;
using System.Text;
using System.Threading.Tasks;
using System.Windows.Forms;
using System.Threading;
namespace app
{
public partial class FrmMain : Form
{
public FrmMain()
{
InitializeComponent();
}
/// <summary>
/// 色相
/// </summary>
/// <param name="sender"></param>
/// <param name="e"></param>
private void trackBarHue_Scroll(object sender, EventArgs e)
{
Mat src = new Mat(@"img\jzh.png", ImreadModes.Color);
Cv2.Resize(src, src, new OpenCvSharp.Size(300, 300), 0, 0, InterpolationFlags.Linear);
this.picSrc.Image = BitmapConverter.ToBitmap(src);
lblHueNum.Text = trackBarHue.Value.ToString();
Mat hsv = new Mat();
Cv2.CvtColor(src, hsv, ColorConversionCodes.BGR2HSV);
Mat[] channels = Cv2.Split(hsv);
// 遍历所有像素
for (int i = 0; i < channels[0].Rows; i++)
{
for (int j = 0; j < channels[0].Cols; j++)
{
channels[0].Set(i, j, trackBarHue.Value);
}
}
// 合并通道
Cv2.Merge(channels, hsv);
Mat newImage = new Mat();
Cv2.CvtColor(hsv, newImage, ColorConversionCodes.HSV2BGR);
this.picDest.Image = BitmapConverter.ToBitmap(newImage);
}
/// <summary>
/// 饱和度
/// </summary>
/// <param name="sender"></param>
/// <param name="e"></param>
private void trackBarSaturation_Scroll(object sender, EventArgs e)
{
Mat src = new Mat(@"img\jzh.png", ImreadModes.Color);
Cv2.Resize(src, src, new OpenCvSharp.Size(300, 300), 0, 0, InterpolationFlags.Linear);
this.picSrc.Image = BitmapConverter.ToBitmap(src);
lblSaturationNum.Text = trackBarSaturation.Value.ToString();
Mat hsv = new Mat();
Cv2.CvtColor(src, hsv, ColorConversionCodes.BGR2HSV);
Mat[] channels = Cv2.Split(hsv);
// 遍历所有像素
for (int i = 0; i < channels[1].Rows; i++)
{
for (int j = 0; j < channels[1].Cols; j++)
{
channels[1].Set(i, j, trackBarSaturation.Value);
}
}
// 合并通道
Cv2.Merge(channels, hsv);
Mat newImage = new Mat();
Cv2.CvtColor(hsv, newImage, ColorConversionCodes.HSV2BGR);
this.picDest.Image = BitmapConverter.ToBitmap(newImage);
}
/// <summary>
/// 亮度
/// </summary>
/// <param name="sender"></param>
/// <param name="e"></param>
private void trackBarLightness_Scroll(object sender, EventArgs e)
{
Mat src = new Mat(@"img\jzh.png", ImreadModes.Color);
Cv2.Resize(src, src, new OpenCvSharp.Size(300, 300), 0, 0, InterpolationFlags.Linear);
this.picSrc.Image = BitmapConverter.ToBitmap(src);
lblLightnessNum.Text = trackBarLightness.Value.ToString();
Mat hsv = new Mat();
Cv2.CvtColor(src, hsv, ColorConversionCodes.BGR2HSV);
Mat[] channels = Cv2.Split(hsv);
// 遍历所有像素
for (int i = 0; i < channels[2].Rows; i++)
{
for (int j = 0; j < channels[2].Cols; j++)
{
channels[2].Set(i, j, trackBarLightness.Value);
}
}
// 合并通道
Cv2.Merge(channels, hsv);
Mat newImage = new Mat();
Cv2.CvtColor(hsv, newImage, ColorConversionCodes.HSV2BGR);
this.picDest.Image = BitmapConverter.ToBitmap(newImage);
}
}
}