Arduino 舵机 SG90

1、舵机红色线接开发板5V,棕色线接开发板GND,橙色信号线接开发板数字引脚9。
2、代码。
#include <Servo.h>
Servo myservo; // 定义Servo对象来控制
#define ServerPin 9
// 舵机 控制线 连接 数字9
#define PotentiometerPin A0 // 电位器 控制线 连接 A0
int i = 0; // 角度存储变量
void setup()

1、舵机红色线接开发板5V,棕色线接开发板GND,橙色信号线接开发板数字引脚9。
2、代码。
#include <Servo.h>
Servo myservo; // 定义Servo对象来控制
#define ServerPin 9
// 舵机 控制线 连接 数字9
#define PotentiometerPin A0 // 电位器 控制线 连接 A0
int i = 0; // 角度存储变量
void setup()

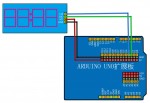
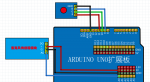
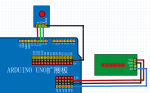
1、电机驱动模块采用 L9110。
2、代码。
const int IA = 7;
//
pin 7 connected to pin IA
const int IB = 8;
//
pin 8 connected to pin IB
byte speed = 255;
// change this (0-255) to control the speed of the motor
void setup() {
pinMode(IA, OU

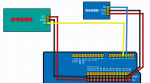
1、称重模块采用HX711芯片。
2、代码。
#include “HX711.h” //调用24bitAD HX711库
HX711 HX711_CH0(2, 3, 345); //SCK,DT,GapValue
//SCK引脚用于arduino和HX711模块通讯的时序提供
//DT引脚用于从HX711读取AD的数据
//GapValue用于校准输出的重量值,如果数值偏大就加大该值,如果数据偏小就减小该值
int LED = 13;
long Wei

1、注意:Arduino Uno、Arduino Mega2650等板子的接法不同。
2、代码:本文使用的是Arduino Mega2650。
/*
* ——————————————————————————————————————–
* Example sketch/program showing how to re

1、注意:超声波模块的有效范围2cm-450cm(300cm以内)。超声波模块直接放在桌面上,距离小于2cm时,会出现数据不准确,例如1187.52cm。
2、代码:
#define TrigPin 2
#define EchoPin 3
float DistanceCM;
void setup()
{
Serial.begin(9600);
pinMode(TrigPin, OUTPUT);
pinMode(EchoPin, INPUT);

注意:测试过程中由于接线错误导致了步进电机只振动不转。
1、步进电机:28BYJ-48
28:步进电机的有效最大外径是28毫米。
B:表示是步进电机。
Y:表示是永磁式。
J:表示是减速型(减速比1:64)。
48:表示四相八拍。
2、Arduino 代码:
#include <Arduino.h>
#define A1 3 //引脚命名
#define B1 4
#define C1 5
#define D1 6
void

1、蓝牙模块:HC-05(ZS-040)
2、Arduino 代码:
#define BTSerial
Serial3
#define DEBUGSerial Serial
#define LED_R 2
#define LED_G 3
#define LED_B 4
#define LED_ON
LOW
#define LED_OFF HIGH
const unsigned int BTRxBufferLength = 100;
ch

本产品内置 HTTP Server,可以通过 PC 机或者手机等其他智能终端的浏览器进行配置,无需其他配置工具或者 APP。在出厂设置中,固件默认工作在 AP 模式,WiFi 模块主动发出来的热点名称为:“Doit_WiFi_xxxxxx”,其中“xxxxxx”是该模块的 MAC 地址后六位。可以使用带无线网卡的 PC 机或者智能手机/平板(支持 Android 和 IOS、Windows Phone 等)连接该热点。热点无密码。
连接成功,使用浏览器访问默认IP地址“192.1
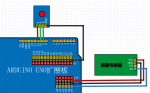
#include “TM1637.h”
#define CLK 3 // pins definitions for TM1637 and can be changed to other ports
#define DIO 2
TM1637 tm1637(CLK, DIO);
void setup()
{
tm1637.init();
tm1637.set(BRIGHT_TYPICAL); // BRIGHT_TYPICAL = 2, BRIGHT_DARK

C:\Program Files (x86)\Arduino\libraries\UTFT\DefaultFonts.c:14:14: error: variable ‘SmallFont’ must be const in order to be put into read-only section by means of ‘__attribute__((progmem))’
fontdatatype SmallFont[1144] PROGMEM={
^~~~~~~~~
C

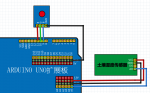
/*——–Arduino Uno connection to LCD———————————————–
LCD Module
Arduino Uno
GND————————-GND
VDD————————-5.0V
RST(Floating)
SCL————————-A5(PC5)
SDA–

代码
#include <SPI.h>
#include <Ethernet.h>
/***************************************************************************
* Internet Connectivity Setup – Variables & Functions
************************************************

代码
#include <DHT.h>
//定义针脚
#define DHTPIN 2
//定义类型 DHT11或者其它
#define DHTTYPE DHT11
//进行初始设置
DHT dht(DHTPIN, DHTTYPE);
#include <LiquidCrystal_I2C.h>
#include <Wire.h>
LiquidCrystal_I2C lcd(0x27, 16, 2); //

安装OneWire(单总线)库
#include <Arduino.h>
#include <OneWire.h>
#define DebugSerial Serial // 用于把数据通过串口界面返回
OneWire ds(2);
// 连接arduino 引脚2
#include <LiquidCrystal_I2C.h>
#include <Wire.h>
LiquidCrystal_I2C
#define vibratorPin 2 // 振动器引脚
#define buzzerPin 3 // 蜂鸣器引脚
int count = 0; // 计数变量
int flag = 0;
// 中断执行标志位
void setup()
{
pinMode(vibratorPin, INPUT_PULLUP); // 按键设置为输入带上拉
pinMode(buzzerPin, OUTPUT);
attachInterrupt(0, buzzer
代码
int analogPin = A0; //
int val = 0; // variable to store the value read
int value = 0;
#define ledPin 9
#define MIC_MAX 100
void setup()
{
Serial.begin(9600); // setup serial
pinMode(ledPin, OUTPUT);
}
void loo
代码
int analogPin = A5; //
int val = 0; // variable to store the value read
int value = 0;
#define ledPin 9
#define MQ_MAX 70
void setup()
{
Serial.begin(9600); // setup serial
pinMode(ledPin, OUTPUT);
Serial.println(“MQ2 INI
代码
int analogPin = A5;
int val = 0; // variable to store the value read
int value = 0;
#define ledPin 9
#define LIGHT_MAX 70
void setup()
{
Serial.begin(9600); // setup serial
pinMode(ledPin, OUTPUT);
}
void loop()
{
v
代码
int analogPin = A5; // 连接模拟针脚A5
int val = 0; // variable to store the value read
int value = 0;
#define ledPin 9
#define LIGHT_MAX 70
void setup()
{
Serial.begin(9600); // setup serial
pinMode(ledPin, OUTPUT);
}
void lo

代码
#define buzzer 3
int i = 0;
void setup()
{
pinMode(buzzer, OUTPUT);
digitalWrite(buzzer, LOW);
Serial.begin(9600); // setup serial
}
void loop()
{
digitalWrite(buzzer, HIGH);
delay(1000);
digitalWrite(buzzer, LOW);