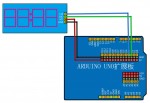
Arduino 步进电机

注意:测试过程中由于接线错误导致了步进电机只振动不转。
1、步进电机:28BYJ-48
28:步进电机的有效最大外径是28毫米。
B:表示是步进电机。
Y:表示是永磁式。
J:表示是减速型(减速比1:64)。
48:表示四相八拍。
2、Arduino 代码:
#include <Arduino.h>
#define A1 3 //引脚命名
#define B1 4
#define C1 5
#define D1 6
void

注意:测试过程中由于接线错误导致了步进电机只振动不转。
1、步进电机:28BYJ-48
28:步进电机的有效最大外径是28毫米。
B:表示是步进电机。
Y:表示是永磁式。
J:表示是减速型(减速比1:64)。
48:表示四相八拍。
2、Arduino 代码:
#include <Arduino.h>
#define A1 3 //引脚命名
#define B1 4
#define C1 5
#define D1 6
void
Gradle sync failed: Unsupported method: SyncIssue.getMultiLineMessage().
The version of Gradle you connect to does not support that method.
To resolve the problem you can change/upgrade the target version of Gradle you connect to.
Alternatively

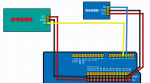
1、蓝牙模块:HC-05(ZS-040)
2、Arduino 代码:
#define BTSerial
Serial3
#define DEBUGSerial Serial
#define LED_R 2
#define LED_G 3
#define LED_B 4
#define LED_ON
LOW
#define LED_OFF HIGH
const unsigned int BTRxBufferLength = 100;
ch

尝试1:设置代理(失败):
1、单击Setup Proxy。
2、HTTP Proxy。
选择Manual proxy configuration。
Host name:mirrors.neusoft.edu.cn
Port number:80
尝试2:安装SDK Tools(成功)。
1、安装。SDK Tools:installer_r24.4.1-windows.exe
2、运行SDK Manager.exe。
3、设置SDK位置。

官网:https://www.netsarang.com
下载:https://www.netsarang.com/zh/free-for-home-school/
输入姓名、邮件,会收到下载地址。

1、查看可用的 CentOS 版本。
访问 CentOS 镜像库地址:https://hub.docker.com/_/centos?tab=tags&page=1。
2、拉取指定版本的 CentOS 镜像,这里我们安装指定版本为例(centos7)。
docker pull centos:centos7
3、查看本地镜像。
docker images
4、运行容器。
docker run -itd –name mycentos –privil
在使用docker容器时,如果没有安装vim,输入vim命令时会出现提示“vim: command not found”。
而输入apt-get install vim命令时,会出现提示“Unable to locate package vim”。
bash: vim: command not found
root@3ae51f734902:/etc# apt-get install vim
Reading package lists… Done
Building

访问 Nginx 镜像库地址:https://hub.docker.com/_/nginx?tab=tags&page=1&ordering=last_updated
1、拉取镜像。
docker pull nginx
2、查看本地镜像。
docker images
3、运行容器。(阿里云防火墙放行9000端口)
docker run –name mynginx -p 9000:80 -d nginx
参数说明:
–name mynginx:容

查找 Docker Hub 上的 Tomcat 镜像。
1、拉取镜像。
docker pull tomcat
2、查看本地镜像。
docker images
3、使用 tomcat 镜像 运行容器。
docker run -d –name mytomcat -p 8080:8080 tomcat
命令解释:docker run -d –name mytomcat -p 8080(宿主机器端口):8080(docker tomcat 容器端口) tomc
在我们运行 docker pull image 或者 docker run 一个本地不存在的image时候,通常这个过程会很漫长……
解决方法是使用阿里云镜像加速器,在/etc/docker文件夹下,修改daemon.json。如果不存在这样的文件,新建一个即可。
1、cd /etc/docker
2、sudo vim daemon.json
3、编辑。再按ESC进入Command模式,然后输入“:wq”,回车就可以保存并退出。
{
“registry-mirror

1、使用 root 权限登录 Centos。确保 yum 包更新到最新。
sudo yum update
2、安装需要的软件包, yum-util 提供yum-config-manager功能,另外两个是devicemapper驱动依赖的。
sudo yum install -y yum-utils device-mapper-persistent-data lvm2
3、设置稳定的仓库。
sudo yum-config-manager –add-repo http:

本产品内置 HTTP Server,可以通过 PC 机或者手机等其他智能终端的浏览器进行配置,无需其他配置工具或者 APP。在出厂设置中,固件默认工作在 AP 模式,WiFi 模块主动发出来的热点名称为:“Doit_WiFi_xxxxxx”,其中“xxxxxx”是该模块的 MAC 地址后六位。可以使用带无线网卡的 PC 机或者智能手机/平板(支持 Android 和 IOS、Windows Phone 等)连接该热点。热点无密码。
连接成功,使用浏览器访问默认IP地址“192.1

1、证书资源包。
https://common-buy.aliyun.com/?spm=a2c4g.11186623.2.8.37a04802VlSViJ&commodityCode=cas_dv_public_cn&request=%7B%22ord_time%22:%221:Year%22,%22order_num%22:1,%22product%22:%22free_product%22,%22certCount%22:%2220%22%7D
2、证书申请。绑
#include “TM1637.h”
#define CLK 3 // pins definitions for TM1637 and can be changed to other ports
#define DIO 2
TM1637 tm1637(CLK, DIO);
void setup()
{
tm1637.init();
tm1637.set(BRIGHT_TYPICAL); // BRIGHT_TYPICAL = 2, BRIGHT_DARK

C:\Program Files (x86)\Arduino\libraries\UTFT\DefaultFonts.c:14:14: error: variable ‘SmallFont’ must be const in order to be put into read-only section by means of ‘__attribute__((progmem))’
fontdatatype SmallFont[1144] PROGMEM={
^~~~~~~~~
C

/*——–Arduino Uno connection to LCD———————————————–
LCD Module
Arduino Uno
GND————————-GND
VDD————————-5.0V
RST(Floating)
SCL————————-A5(PC5)
SDA–

代码
#include <SPI.h>
#include <Ethernet.h>
/***************************************************************************
* Internet Connectivity Setup – Variables & Functions
************************************************

代码
#include <DHT.h>
//定义针脚
#define DHTPIN 2
//定义类型 DHT11或者其它
#define DHTTYPE DHT11
//进行初始设置
DHT dht(DHTPIN, DHTTYPE);
#include <LiquidCrystal_I2C.h>
#include <Wire.h>
LiquidCrystal_I2C lcd(0x27, 16, 2); //

安装OneWire(单总线)库
#include <Arduino.h>
#include <OneWire.h>
#define DebugSerial Serial // 用于把数据通过串口界面返回
OneWire ds(2);
// 连接arduino 引脚2
#include <LiquidCrystal_I2C.h>
#include <Wire.h>
LiquidCrystal_I2C
#define vibratorPin 2 // 振动器引脚
#define buzzerPin 3 // 蜂鸣器引脚
int count = 0; // 计数变量
int flag = 0;
// 中断执行标志位
void setup()
{
pinMode(vibratorPin, INPUT_PULLUP); // 按键设置为输入带上拉
pinMode(buzzerPin, OUTPUT);
attachInterrupt(0, buzzer