
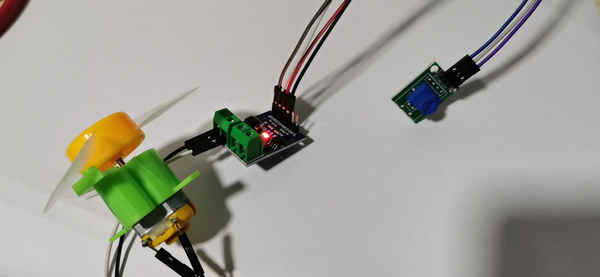

1、电机驱动模块采用 L9110。
2、代码。
const int IA = 7; // pin 7 connected to pin IA
const int IB = 8; // pin 8 connected to pin IB
byte speed = 255; // change this (0-255) to control the speed of the motor
void setup() {
pinMode(IA, OUTPUT); // set pins to output
pinMode(IB, OUTPUT);
Serial.begin(9600);
}
void loop() {
int offsetX = 525; // 电位器中间值。
int x = analogRead(A0);
bool isFoward = x <= offsetX;
// Exp1 ? Exp2 : Exp3;
// ? : 运算符(三元运算符)其中,Exp1、Exp2 和 Exp3 是表达式。请注意,冒号的使用和位置。
// ? 表达式的值是由 Exp1 决定的。如果 Exp1 为真,则计算 Exp2 的值,结果即为整个 ? 表达式的值。如果 Exp1 为假,则计算 Exp3 的值,结果即为整个 ? 表达式的值。
speed = x == offsetX ? 0 : (isFoward ? (255 - map(x, 0, offsetX, 0, 255)) : map(x, 0, 1024, 0, 255));
Serial.println(speed);
isFoward ? forward() : backward();
}
// 反转
void backward()
{
analogWrite(IA, 0);
analogWrite(IB, speed);
}
// 正转
void forward()
{
analogWrite(IA, speed);
analogWrite(IB, 0);
}