
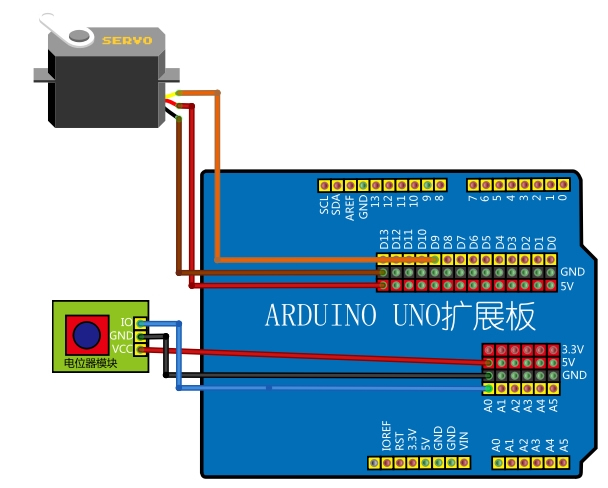
1、舵机红色线接开发板5V,棕色线接开发板GND,橙色信号线接开发板数字引脚9。
2、代码。
#include <Servo.h>
Servo myservo; // 定义Servo对象来控制
#define ServerPin 9 // 舵机 控制线 连接 数字9
#define PotentiometerPin A0 // 电位器 控制线 连接 A0
int i = 0; // 角度存储变量
void setup() {
myservo.attach(ServerPin); // 设定舵机接口
}
void loop() {
// 手动测试
// analogRead 读取电位器的输入值
// 用于设定舵机旋转的角度,可设定范围0°—180°。
//myservo.write( map(analogRead(PotentiometerPin), 0, 1023, 0, 180) );
// 自动测试
for (i = 0; i <= 180; i ++) { // 0°到180°
// 步长为 1°
myservo.write(i); // 舵机角度写入
delay(5); // 等待转动到指定角度
}
// 从180°到0°
for (i = 180; i >= 0; i --) {
myservo.write(i); // 舵机角度写入
delay(5); // 等待转动到指定角度
}
}