c# OpenCvSharp 自适应阈值 AdaptiveThreshold

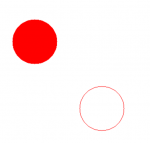
自适应阈值(AdaptiveThreshold):用于二值化处理图像,对于对比大的图像有较好效果,相对于opencv中固定阈值化操作(Threshold),自适应阈值中图像中每一个像素点的阈值是不同的,该阈值由其领域中图像像素带点加权平均决定。这样做的好处:
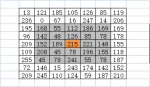
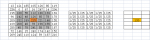
1、每个像素位置处的二值化阈值不是固定不变的,而是由其周围邻域像素的分布来决定的。
2、亮度较高的图像区域的二值化阈值通常会较高,而亮度较低的图像区域的二值化阈值则会相适应地变小。
3、不同亮度、对比度、纹理的局部图像区域